
Przedłużacze readycable® dla AIDA
Gotowe do podłączenia przedłużacze AIDA dla automatyzacji
Inicjatywa Niemieckich Producentów Samochodów na rzecz Automatyzacji (Automobile Manufacturers Automation Initiative, AIDA) opracowała wytyczne dotyczące okablowania pomiędzy szafą sterowniczą, podstawą robota oraz ruchomymi osiami robota. igus® readycable® podąża za tym standardem okablowania robotów w przemyśle motoryzacyjnym i obecnie oferuje gotowe do podłączenia przewody chainflex® dla bezpiecznego i niezawodnego zastosowania w aplikacjach ruchomych.Bezposrednio z katalogu lub z indywidualnymi dostosowaniami, oferujemy konfiguracje przewodów AIDA z komponentami push-pull firmy HARTING w różnych jakościach chainflex. Ponadto nasze przedłużacze oferują dalsze możliwości oszczędzania, ponieważ można zrezygnować z typowych skrzynek przyłączeniowych (łącznik męski/żeński). Wszystkie gotowe do podłączenia przewody są w 100% przetestowane i oznaczone pieczęcią testową.
Przejdź do sklepu online

Technologia w górę
- 50% mniejszy nakład pracy przy montażu dzięki technologii push-pull
- Istniejące systemy robotów i interfejsy można elastycznie rozbudowywać dzięki sprawdzonym przedłużaczom
- Gotowe do natychmiastowego użycia, konfekcjonowane i gotowe do podłączenia

Koszty w dół
- Różne jakości przewodów i kategorii cenowych: wybierasz przewód o najlepszym stosunku ceny do wydajności dla Twojej aplikacji robotycznej

Dowód
- Wszystkie elementy posiadają stopień ochrony IP67
- W 100% przetestowane
- Przetestowane w największym tego rodzaju laboratorium testowym dla przewodów w zastosowaniach ruchomych

Zrównoważony rozwój
- Gwarantowana żywotność dla każdego e-prowadnika igus® - do 36 miesięcy gwarancji
- Wyposaż zastosowania robotyczne w wytrzymałe przedłużacze i zminimalizuj przerwy serwisowe
Markus Hüffel, Product Manager, wygłosi krótkie wprowadzenie
Przedłużacze zgodne ze standardem AIDA, zarówno w technologii BUS'owej, jak i ze złączem zasilającym. Wszystko z gwarancją do 36 miesięcy i w 100% wykonane w Niemczech.Rzut okiem na wszystkie szczegóły dotyczące konfekcjonowanych przedłużaczy AIDA
| Nr art. | Rodzaj przewodu | Opcje połączenia | Rodzaj osi | Ilość żył i przekrój nominalny żyły | Średnica zewnętrzna | |
|---|---|---|---|---|---|---|
| [mm²] | [mm] | |||||
| MAT904152118 | AIDA Profinet - RJ-45 | (Gniazdo/Sworzeń) | Przedłużacz osi 7 | (4x0,38)C | 7,0 | Zamów MAT904152118 |
| MAT904151684 | AIDA Profinet - RJ-45 | Gniazdo/Gniazdo | Przedłużacz osi 7 | (4x0,38)C | 7,0 | Zamów MAT904151684 |
| MAT904152121 | AIDA Profinet - RJ-45 | (Gniazdo/Sworzeń) | Przedłużacz osi 1-6. Oś | (2x(2x0,34))C | 8,5 | Zamów MAT904152121 |
| MAT904151687 | AIDA Profinet - RJ-45 | Gniazdo/Gniazdo | Przedłużacz osi 1-6. Oś | (2x(2x0,34))C | 8,5 | Zamów MAT904151687 |
| MAT904152119 | AIDA Power | (Gniazdo/Sworzeń) | Przedłużacz osi 7 | 5G2,5 | 10 | Zamów MAT904152119 |
| MAT904151685 | AIDA Power | Gniazdo/Gniazdo | Przedłużacz osi 7 | 5G2,5 | 10 | Zamów MAT904151685 |
| MAT904152122 | AIDA Power | (Gniazdo/Sworzeń) | Przedłużacz osi 1-6. Oś | 5G2,5 | 10 | Zamów MAT904152122 |
| MAT904151688 | AIDA Power | Gniazdo/Gniazdo | Przedłużacz osi 1-6. Oś | 5G2,5 | 10 | Zamów MAT904151688 |
| MAT904152120 | AIDA Signal | (Gniazdo/Sworzeń) | Przedłużacz osi 7 | 5x(2x0,5))C | 11 | Zamów MAT904152120 |
| MAT904151686 | AIDA Signal | Gniazdo/Gniazdo | Przedłużacz osi 7 | 5x(2x0,5))C | 11 | Zamów MAT904151686 |
| MAT904152123 | AIDA Signal | (Gniazdo/Sworzeń) | Przedłużacz osi 1-6. Oś | 5x(2x0,5))C | 11 | Zamów MAT904152123 |
| MAT904151689 | AIDA Signal | Gniazdo/Gniazdo | Przedłużacz osi 1-6. Oś | 5x(2x0,5))C | 11 | Zamów MAT904151689 |
Przejdź do sklepu AIDA
Struktura przewodu robota chainflex
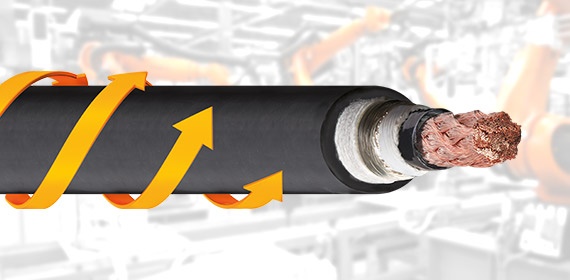
Żyły, struktura skrętki, ekrany i materiały płaszcza muszą kompensować wysokie, naprzemienne obciążenia gnące, a także zmiany średnicy przewodu spowodowane ruchami skrętnymi. Dla wspomnianego naprężenia w obszarze trójwymiarowym, struktura przewodów robotów musi zawierać kombinację miękkich i ślizgowych elementów konstrukcyjnych. Zastosowano elementy wypełniające, które mogą absorbować występujące siły, takie jak skręcanie. W tym celu instalowane są elementy PTFE i nici z wiskozy. Przewody robotów chainflex zawierają również specjalną kombinację wkładek PTFE, aby, zoptymalizowane pod kątem skręcania zespoły ekranów, mogły wykonywać niezbędne ruchy kompensacyjne.
Przewody robotyczne readycable

Konfekcjonowane przewody robotyczne readycable
Przewody do robotów chainflex

Przewody chainflex® do robotów są stosowane w e-prowadnikach lub w rozwiązaniach robotycznych wymagających ruchu w trzech wymiarach. Zapewniamy 36-miesięczną gwarancję na wszystkie przewody opierając się na naszym, ponad 30-letnim doświadczeniu zdobytym we własnym laboratorium testowym o powierzchni 3800 m².
Kliknij tutaj
Konfekcjonowanie readychain

Kliknij tutaj
