Zmień język :
Oprogramowanie igus® Robot Control
Programuj, symuluj i steruj robotami bez licencji
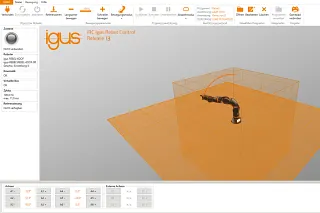
Oprogramowanie igus® Robot Control umożliwia proste i intuicyjne programowanie robotów oraz zarządzanie systemami sterowania, ułatwiając rozpoczęcie pracy z automatyką. Dzięki modułowej strukturze można sterować różnymi kinematykami robotów, np. robotami typu delta, robotami liniowymi oraz wieloosiowymi robotami z ramieniem przegubowym. Oprogramowanie pozwala także symulować poszczególne ruchy robota na powierzchni 3D – robot nie musi być podłączony do tego kroku.
Co można znaleźć na tej stronie
Darmowe oprogramowanie dla robotów
Przykłady programowania różnych aplikacji za pomocą oprogramowania iRC
- Proste połączenie między robotem a systemem sterowania
- Intuicyjna obsługa z interfejsem 3D i cyfrowym bliźniakiem umożliwia bezpośrednie wykonywanie i sprawdzanie sekwencji ruchu
- Możliwość konfiguracji interfejsu kamery bezpośrednio przez system sterowania i oprogramowanie
- Programowanie robotów typu delta, kartezjańskich, SCARA oraz robotów z ramieniem przegubowym
- Oprogramowanie pozwala na bezpieczne testowanie funkcji jeszcze przed zakupem
Wymagania systemowe:
- Komputer PC z systemem operacyjnym Windows 10
- Komunikacja przez Ethernet lub WLAN
- 500 MB wolnego miejsca na dysku
Przykładowe programy, wikipedia i kursy szkoleniowe



Interfejsy
Interfejsy PLC
Interfejs PLC (PLC = Programmable Logic Controller) umożliwia wykonywanie podstawowych funkcji i sygnalizowanie stanów za pomocą cyfrowych wejść i wyjść. Oprócz sterowania przez PLC, interfejs ten umożliwia również obsługę za pomocą przycisków sprzętowych.
Cyfrowe wejścia i wyjścia
Programy robota mogą być ładowane i uruchamiane, a polecenia chwytaka mogą być wysyłane za pośrednictwem wejść cyfrowych lub sygnałów globalnych. Jest to przydatne, na przykład, jeśli program ma być wybrany z danego wyboru za pomocą przycisków lub instrukcji CRI-GSig.
Modbus TCP/IP
Interfejs Modbus TCP może być wykorzystywany do wysyłania danych i instrukcji z PLC do systemu sterowania robotem oraz odbierania informacji o stanie.
Interfejs CRI
Interfejs CRI umożliwia wysyłanie złożonych instrukcji oraz pobieranie informacji i ustawień za pośrednictwem interfejsu Ethernet przy użyciu protokołu TCP/IP. Oprogramowanie igus® Robot Control wykorzystuje ten interfejs do łączenia się z robotami ze zintegrowanym systemem sterowania lub innymi instancjami systemu sterowania.
Interfejs kamery
Interfejs kamery umożliwia korzystanie z kamer do detekcji obiektów oraz kamer wideo. Kamery wykrywające obiekty rozpoznają położenie i klasę obiektów, następnie przesyłają je, opcjonalnie wraz z obrazem wideo, do systemu sterowania. System sterowania oblicza pozycje w układzie współrzędnych robota na podstawie danych z kamery. Typowe kamery wideo dostarczają wyłącznie obraz i dlatego mogą być używane tylko do monitorowania obszaru roboczego, ale nie do wykrywania obiektów.
Chmura
Interfejs chmury umożliwia monitorowanie robota za pośrednictwem platformy RobotDimension. Po aktywowaniu i zalogowaniu się, robot wysyła podstawowe informacje o stanie oraz obrazy z kamer do usługi online. Na stronie internetowej użytkownik może wyświetlić listę swoich robotów i uzyskać dostęp do tych informacji.
ROS, Matlab, LabView, i wiele innych.
Integracja robotów ze środowiskiem ROS. Dokumentacja i pakiety do komunikacji sprzętowej, Teleop i moveI
Konfiguracje projektu
Chwytak
Tutaj można określić zamontowane narzędzie. Zmiana narzędzia wymaga przeładowania projektu lub ponownego uruchomienia zintegrowanego systemu sterowania. Nowe narzędzia można zdefiniować jako plik konfiguracyjny w katalogu „Data/Tools"
Wirtualny obszar roboczy
Zakres ruchu ramienia robota jest ograniczony przez ustawienia wirtualnego obszaru roboczego. Funkcja ta pomaga zapobiegać uszkodzeniom mechanicznym i upraszcza programowanie, w zależności od zastosowania. Jeśli wykonywany jest program, który narusza wirtualny obszar roboczy, program jest zatrzymywany z komunikatem o błędzie.
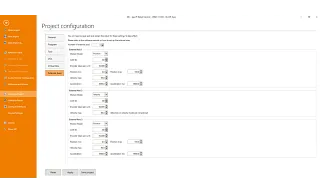
Oś zewnętrzna
Oprogramowanie obsługuje do trzech dodatkowych osi (w iRC nazywanych również „osiami zewnętrznymi”). Można je podłączyć zgodnie z osiami robota oraz konfigurować w iRC.

Program
W tym miejscu można określić robota i program logiczny, prędkość ruchu (w procentach prędkości maksymalnej), tryb odtwarzania oraz sposób reakcji na błędy programu.
Specjalna kinematyka
System sterowania robotem może być dostosowany do danego robota za pomocą cyfrowego bliźniaka. Konfigurujemy odwrotną kinematykę w taki sposób, aby była dopasowana do potrzeb konkretnego projektu.
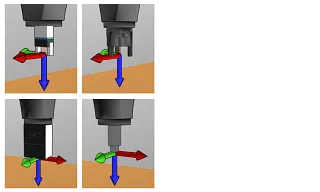
Programowanie
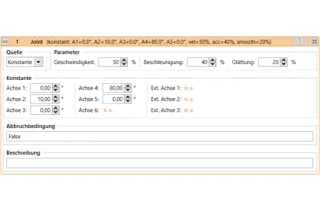
Ruchy osi
Polecenie Joint przesuwa robota do bezwzględnej pozycji docelowej określonej we współrzędnych osi (np. kąt osi lub pozycja osi liniowej). Wynikowy ruch TCP jest zazwyczaj krzywą, a nie linią prostą.
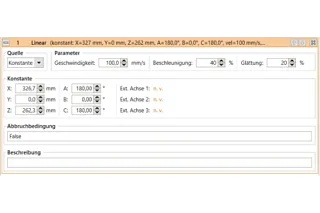
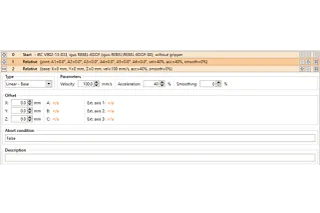
Ruch liniowy
Polecenie ruchu liniowego przesuwa robota do bezwzględnej pozycji docelowej określonej we współrzędnych kartezjańskich. Wynikowy ruch TCP odbywa się po linii prostej.
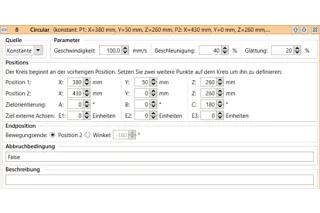
Ruchy okrężne
Instrukcja "Ruch okrężny" umożliwia wykonywanie ruchów po pełnym lub częściowym torze kołowym. Jest ona kompatybilna z ruchami liniowymi, dzięki czemu przejście od i do ruchu liniowego może być wygładzone.
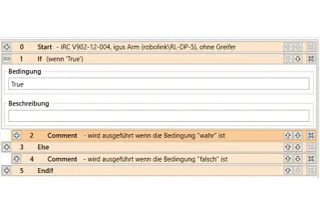
Warunki
Warunki mogą być używane w poleceniach if-then-else, pętlach i jako warunki anulowania w poleceniach ruchu. Warunki mogą być kombinacjami wejść cyfrowych, sygnałów globalnych, operacji logicznych i porównań.
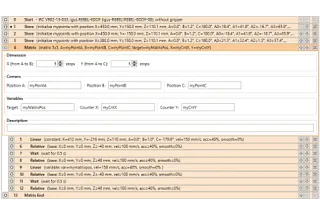
Obliczanie siatki
Instrukcje siatki obliczają pozycje wyrównane do siatki, np. jako pozycje chwytania lub odkładania w zadaniach paletyzacji.
Ruch względny
Polecenie Relative umożliwia przesuwanie robota względem jego bieżącej pozycji. Dostęp do niego można uzyskać za pomocą pozycji menu "Akcja" → "Ruch względny".

Podprogramy
Podprogramy można wywoływać za pomocą polecenia sub-command. Ścieżka do pliku podprogramu jest określona w "Nazwa pliku". Jest ona względna do podfolderu "Programs" folderu iRC "Data".
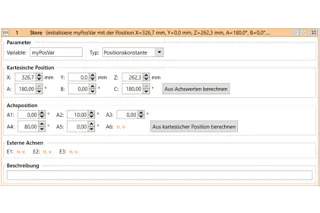
Zmienne i dostęp do zmiennych
W programie dla igus Robot Control i TinyCtrl obsługiwane są dwa typy zmiennych:
- Zmienne liczbowe: Mogą być używane do przechowywania liczb całkowitych lub zmiennoprzecinkowych.
- Zmienne pozycji: Mogą być używane do przechowywania pozycji kartezjańskich i wspólnych pozycji. To, czy taka zmienna jest interpretowana jako pozycja kartezjańska czy pozycja wspólna, zależy od kontekstu.
Pobierz oprogramowanie robota

Bezpłatne i niewymagające licencji oprogramowanie igus® Robot Control jest zintegrowane z systemem sterowania, dzięki czemu wykorzystuje ujednoliconą koncepcję obsługi oraz spójne usługi komunikacyjne dla wielu komponentów jednego systemu. Oznacza to mniej pracy przy planowaniu projektu i szybsze uruchomienie systemu.
- Przetestuj wszystkie kinematyki igus® z wyprzedzeniem w oprogramowaniu
- Dzięki wstępnie zaprogramowanym projektom dla wszystkich robotów igus®, osi pojedynczych i AGV
- Intuicyjny interfejs 3D z symulacją robota
Konsultacje
Z przyjemnością osobiście odpowiem na Państwa pytania

Konsultacje i dostawa
Osobista:
Od poniedziałku do piątku: 7:00–20:00
Sobota: 8:00–12:00
Online:
Umów spotkanie z ekspertem