Więcej rozwiązań z zakresu Ekonomicznej Automatyzacji
Wysoka elastyczność, zapewniana przez nasz modułowy koncept, sprawia, że Ekonomiczna Automatyzacja ma tak uniwersalne zastosowanie. W zależności od zastosowania zestaw konstrukcyjny może posłużyć jako podstawa do stworzenia dostosowanego do własnych potrzeb rozwiązania, uzupełnionego o inne produkty. Poza tradycyjnymi lub wodoszczelnymi silnikami krokowymi igus®, przeguby robota można połączyć również z innymi rodzajami silników, a także z napędami pneumatycznymi. Zestaw konstrukcyjny przegubów nie jest związany z żadnym szczególnym układem sterowniczym, co zapewnia największy możliwy stopień swobody jeśli chodzi o planowanie i wdrażanie procesu automatyzacji.

robolink® wspiera prace magazynowe
robolink® układa pojedyncze części na odpowiednich półkach w magazynierobolink® wspiera prace magazynowe
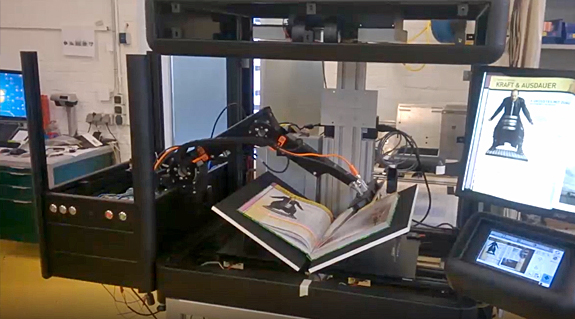
Automatyczny skaner książek
robolink® przewraca strony w skanerze książekAutomatyczny skaner książek
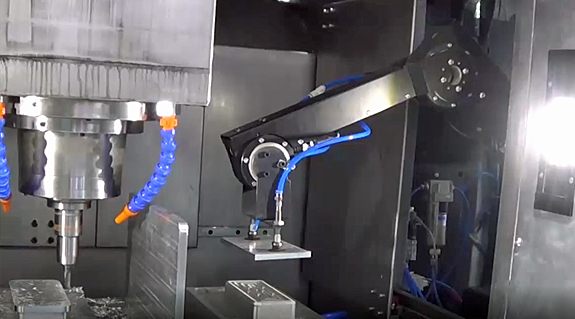
Obrabiarka
robolink® wyjmuje elementy z obrabiarkiObrabiarka
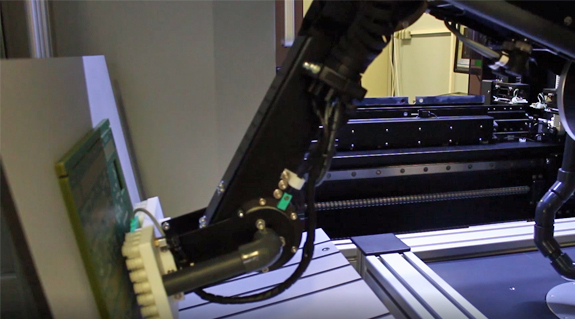
Kontrola jakości drukowanych płytek
robolink umieszcza drukowane płytki w jednostce testującejKontrola jakości drukowanych płytek

Automatyczne pakowanie masek ochronnych
Automatyczne pakowanie masek ochronnychAutomatyczne pakowanie masek ochronnych

Rozbudowa maszyn częściowo zautomatyzowanych
Rozbudowa maszyn częściowo zautomatyzowanychRozbudowa maszyn automatycznych
